Visual Simultaneous Localization and Mapping (SLAM) with EKF Filter
Abstract
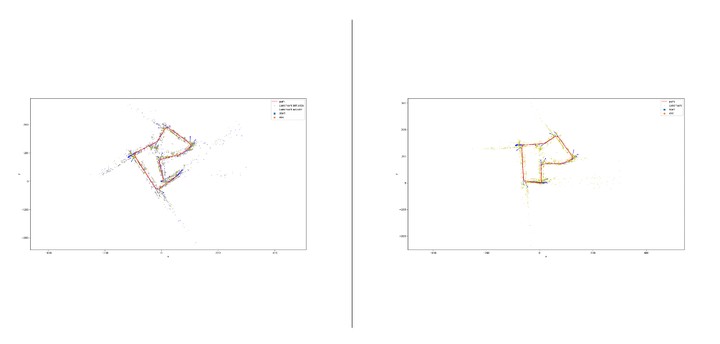
In this project, we propose EKF-based visual slam method to localize robot and generate environment map. In the first part, we implement the EKF prediction step to estimate the IMU pose over time. In the second part, we use the predicted IMU pose to initialize our landmark position. Then we perform EKF update step to track the mean and covariance of our landmark. In the third part, we combine IMU prediction step with landmark EKF udpate and IMU update step together, in order to generate complete visual-inertial SLAM algorithm.
Type